
Team History
Nightmare
-
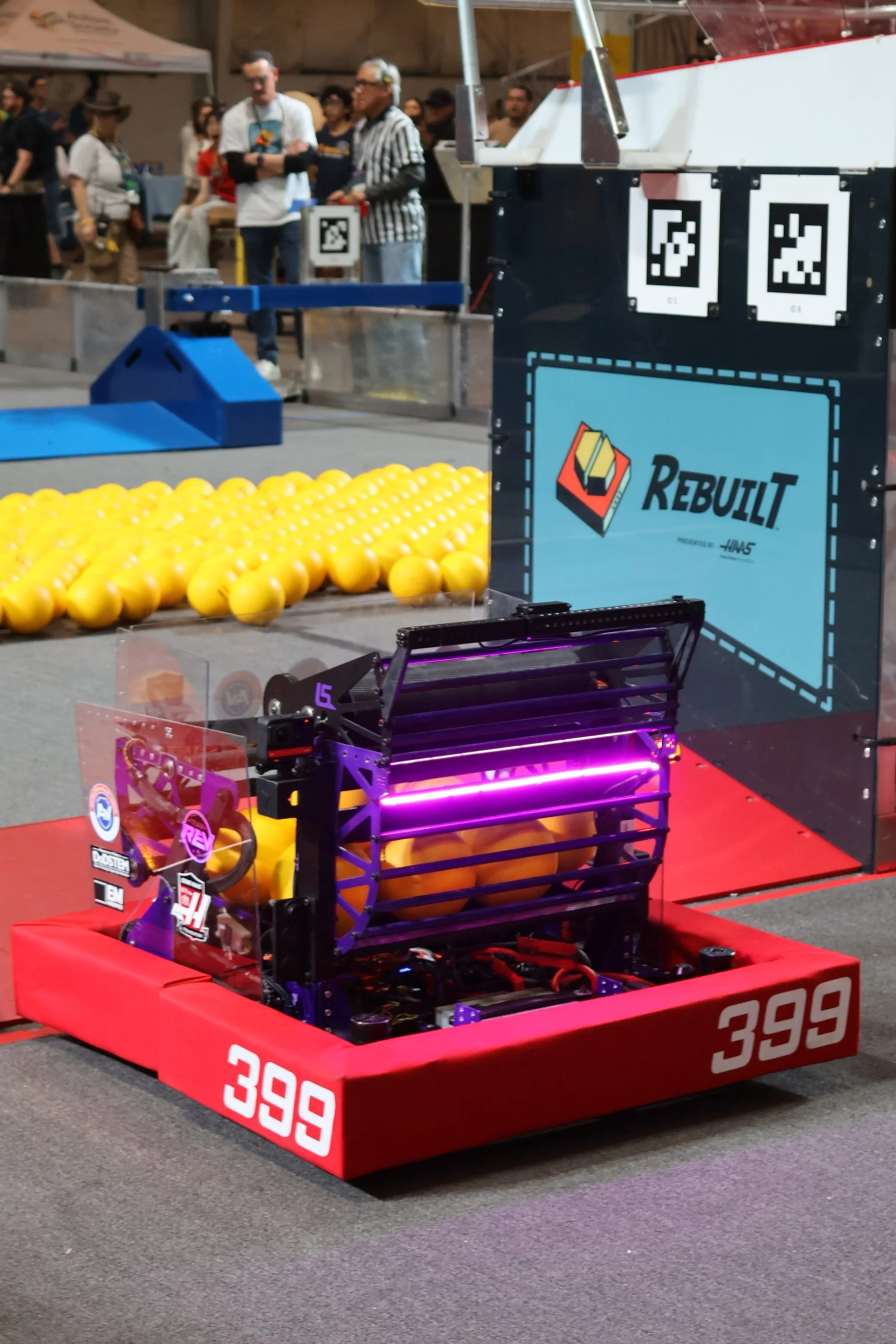
In REBUILT, teams score points by ONLY launching fuel and climbing the ladder within 2 minutes and 40 seconds. During the 20 second autonomous period, both alliances score fuel to the hub that is pre-loaded by a human player collected at the depot, or picked up in the neutral zone. Robots also have the option to climb the tower for additional points. During the rest of the match, alliances will alternate between active and inactive hubs, whoever scores less points starts with their active during the first period of teleop. Alliances will have to focus on timing their bots to shift between moving fuel to their side of the field, to scoring as many points as possible when their hub is active for 45 seconds. Periods will shift 5 times until the last 20 seconds, where both hubs are active.Teams have the option to continue scoring fuel or climbing the 3 tiered- ladder for an increase in points. The alliance that earns the most points wins the match!
-
At the Port Hueneme District Event Week 1, our robot NIGHTMARE demonstrated solid performance and reliability, helping Team 399 earn 18th place out of 42 teams. Over the course of matches we saw consistent scoring, effective defensive plays, and improved autonomous routines compared to pre-event testing. The drive team and pit crew executed fast, precise repairs between matches, enabling sustained performance throughout the day. Key learnings around tuning our intake and optimizing alliance strategies will guide our final tweaks. We’re carrying that momentum forward as we prepare to compete at the AVR event from April 4–6.
Whiplash
-
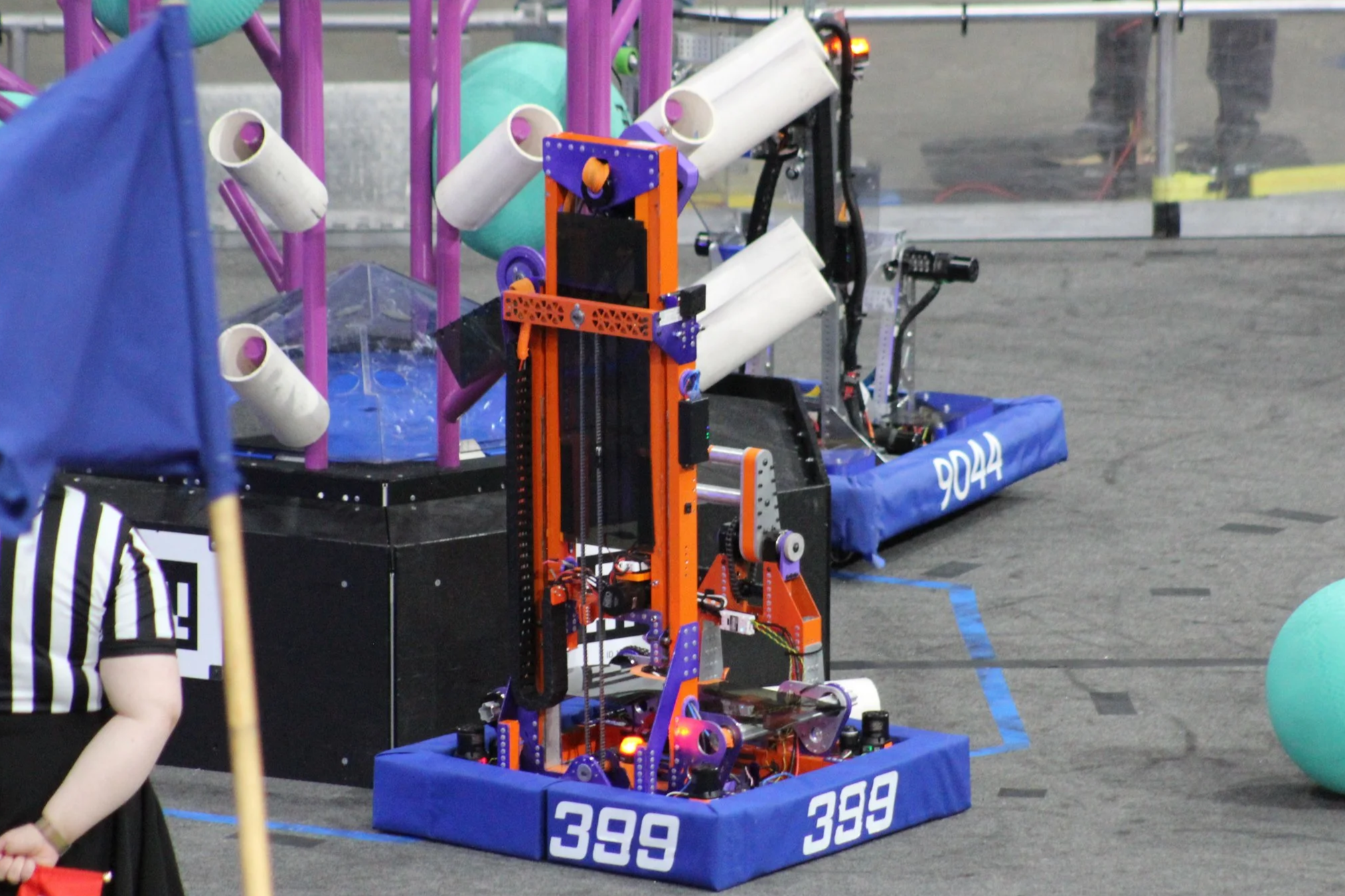
In REEFSCAPE, two alliances are invited to score points through coral, algae, and climbing the barge within 2 minutes and 30 seconds. Each alliance can earn additional ranking points for meeting thresholds as well as cooperating with their opponents. During the autonomous period, robots will meet the starting zone and scoring as much coral as they can and harvest as much algae within 15 seconds till tele-operation (teleop). During the following period, drivers have full control over their robots, which collect coral from human players, to place onto the reef. Some scoring locations are blocked by algae, which must be dislodged from the reef, and delivered to a human player through a processor to earn additional points. Within the last 30 seconds, robots are able to climb onto their cage which are decided to be shallow or deep before the match. A deeper cage will score higher points, but would be more difficult to climb. The alliance that earns the most points wins the match!
-
During the 2025 REEFSCAPE season, Team 399: Eagle Robotics proved to be a powerhouse in the California district, finishing with an overall record of 22 wins and 19 losses. Your standout performance occurred at the Aerospace Valley Regional, where the team ranked #3 in qualifications and advanced all the way to the finals as the first pick of Alliance 2, ultimately earning the Industrial Design Award. While the Hueneme Port and Idaho Regionals saw more challenging qualification rounds, your team’s consistent branding and professional presentation secured the Imagery Award at both events. Beyond the official FIRST schedule, you capped off the year with a major victory as the Winners of Tidal Tumble, proving that the 2025 robot was a championship-caliber machine.
cadence
-
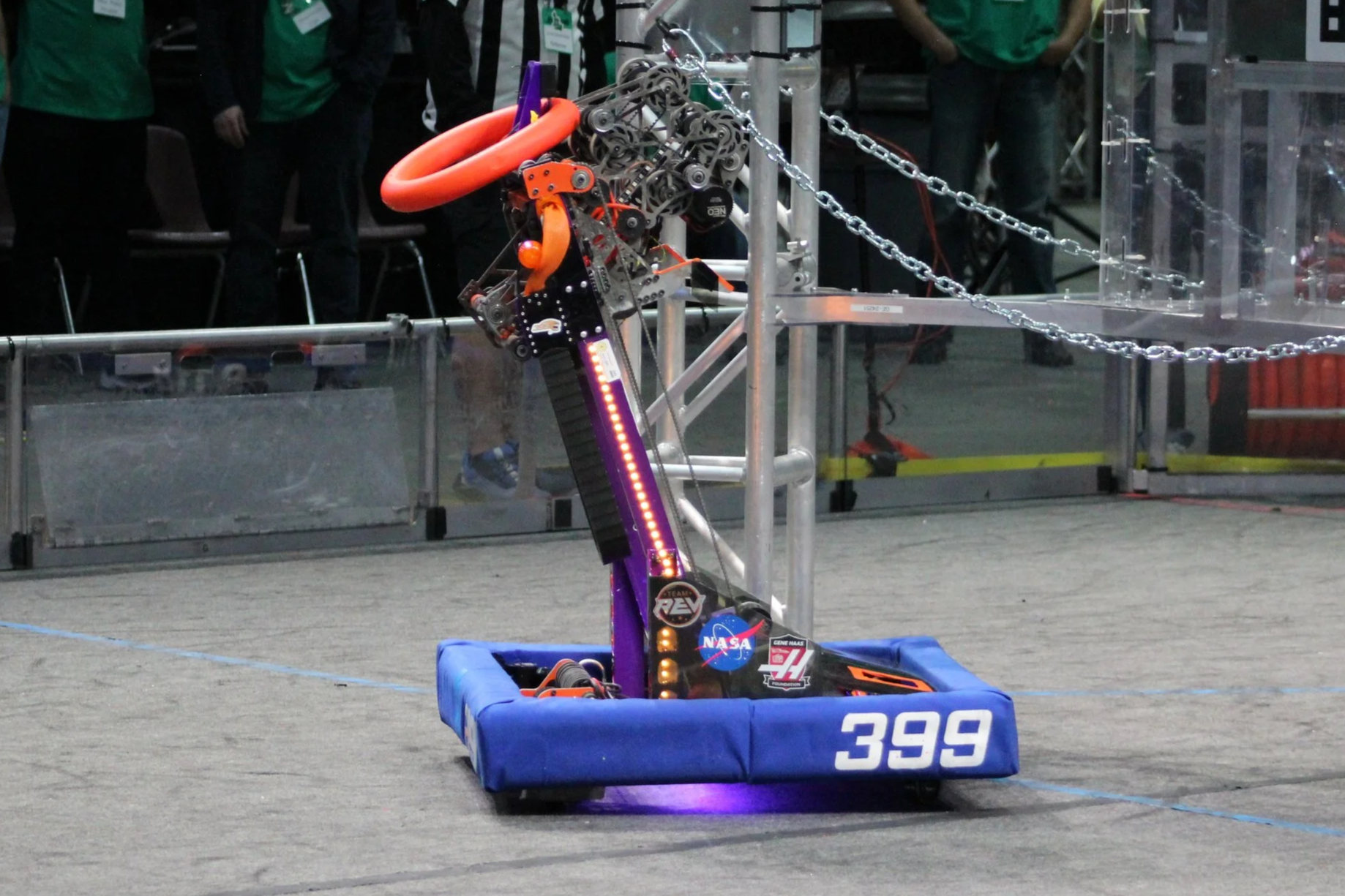
In CRESCENDO, two alliances compete to score notes, amplify their speaker, harmonize onstage, and take the spotlight before the time runs out. Alliances can earn additional ranking points, for meeting specific scoring, thresholds, and collaborating with their opponents. During the first 15 seconds of the match, Robots score notes in their speaker and collect additional notes all without the help of their driver. During the remaining 2 minutes and 15 seconds, drivers have full control over their robot. Robots have the ability to collect notes from human players at their source & score at their amp or speaker. If an alliance gets 2 notes into the amp, teams can activate an amp for 10 seconds. Amped notes score more points. Human players have the option to use a note instead for coopertition. If both alliances hit their coopertition button within the 45 second time limit, both teams will receive the coopertition point. As time runs down to the last 30 seconds, notes are able to be delivered into traps at the center of each alliance's stage. Robots that climb on the same chain, gain additional bonus. Robots can also gain points if the human player spotlights their robot by throwing a note onto their respective mics located above the stage. The alliance that earns the most points wins the match!
-
In the 2024 CRESCENDO season, Team 399: Eagle Robotics competed with our robot, Cadence, across three regional events, finishing with an official season record of 23 wins and 21 losses. Our journey began at the Ventura County Regional, where despite a challenging rank of #46 in qualifications, we were selected for the #3 Alliance and fought through the playoffs to finish 3rd overall. The momentum continued at the Idaho Regional, where we achieved a significant milestone by becoming the Alliance Captain of Alliance 6—the first time the team has captained a regional alliance since 2018—and advanced all the way to the semifinals. We concluded the official season at our home event, the Aerospace Valley Regional, competing in front of your local community in Lancaster. Throughout the year, our team’s dedication to professional aesthetics and branding was highly recognized, as we brought home the Imagery Award in honor of Jack Kamen from both the Ventura County and Idaho events.

quantum
-
CHARGED UP was a fast-paced game where two alliances of three robots competed to score yellow cones and purple cubes into three-tiered Grids to earn points and create three-piece Links. Matches began with a 15-second autonomous period, followed by teleoperated control where robots retrieved pieces from human-player Substations and navigated a central Charge Station—a large teeter-totter platform. Scoring relied on precision placement, with higher grid tiers worth more points, while the endgame focused on "Engaging" the Charge Station by balancing multiple robots on it to remain level. Alliances could earn additional Ranking Points by completing a specific number of Links or achieving a high enough point total on the Charge Station, making it a game of both high-stakes placement and mechanical balance.
-
In the 2023 CHARGED UP season, we had a high-energy year representing Lancaster, California, through some intense competition and community leadership. At the Ventura County and Aerospace Valley Regionals, we showcased our robot's capabilities and took home the Imagery Award and the prestigious Engineering Inspiration Award. That second win was a huge milestone for us, as it punched our ticket to the FIRST Championship in Houston to compete in the Curie Division. We finished our championship qualification matches with a solid 6–4–0 record, ranking 46th in a very tough field. Beyond the matches, we were also proud to continue our tradition of hosting RoboProm, bringing together teams from all over the world for a night of fun away from the pits.

SCRAPPY
-
RAPID REACT, the 2022 FIRST Robotics Competition game presented by Boeing, focused on the future of transportation and featured a fast-paced "cargo" handling challenge. Two alliances of three robots competed to collect and shoot oversized tennis ball Cargo into a central, two-tiered Hub, with the higher opening offering more points. The match began with a 15-second autonomous period where robots could earn a "quintet" bonus, followed by a teleoperated period where human players could also assist by feeding Cargo through field-corner Terminals. The game concluded with an intense endgame in the Hangar, where robots climbed a series of four increasing rungs—Low, Mid, High, and Traversal—to earn significant bonus points and Ranking Points based on their final hanging height.
-
For our 2022 RAPID REACT season, we at Team 399 Eagle Robotics had an incredibly competitive run with our robot, SCRAPPY. We started strong at the Hueneme Port Regional, where we finished as Finalists and took home the Quality Award for our robust machine design. We followed that up at the Aerospace Valley Regional by reaching the semi-finals and winning the Innovation in Control Award, which recognized our advanced software and sensor integration. These performances earned us a spot at the FIRST Championship in Houston, where we competed in the Roebling Division. We finished qualification matches with a 5–5–0 record, ranking 38th in a division packed with world-class teams. It was a season defined by our high-climbing ability and consistent upper-hub scoring, keeping the Eagle Robotics legacy flying high.

TEMPEST V2
-
INFINITE RECHARGE (2021) was a unique season for FIRST Robotics Competition because, due to the COVID-19 pandemic, it transitioned into a primarily virtual "At Home" experience. We reused the 2020 game theme—protecting "FIRST City" from asteroids—but competed through three new remote challenges: INFINITE RECHARGE at Home, the Game Design Challenge, and the FIRST Innovation Challenge. The "At Home" component featured five individual robot skills tests, such as the Galactic Search and Power Port Challenge, where we demonstrated our robot's speed and shooting accuracy in our own workspace rather than on a traditional competition field.
-
For Team 399 Eagle Robotics, the 2021 season was a period of resilience as we navigated these virtual formats. We competed in the Samarium Group for the At Home challenges, where we submitted technical documentation and performance videos of our robot to be evaluated by judges. This allowed us to keep refining our engineering and programming skills even while in-person regionals were sidelined, ensuring our team remained "charged up" for the return to the field in the following seasons.

TEMPEST
-
INFINITE RECHARGE, the 2020 and 2021 FIRST Robotics Competition game themed around Star Wars: Force for Change, tasked alliances with protecting "FIRST City" from incoming asteroids. Two alliances of three robots competed to collect and shoot yellow foam Power Cells into a three-tiered Power Port, with the highest "Inner Port" offering the most points. The game featured a unique Control Panel—a large spinning color wheel—that robots had to rotate a specific number of times or to a specific color to "reach" higher stages of capacity. Matches concluded with an intense endgame at the Generator Switch, a swinging triangular bar where multiple robots attempted to climb and level the structure for a significant "Shield Generator" bonus.
-
For our 2020 INFINITE RECHARGE season, we at Team 399 Eagle Robotics came out of the gate swinging with our robot, TEMPEST. We competed at the Lancaster Regional, where we dominated the field to become Regional Winners and earned the Quality Award for our machine's robust build. That victory originally punched our ticket to the World Championship, but as you know, the season was cut short just weeks later due to the pandemic. Despite the shutdown, we transitioned into the 2021 At Home challenges, where we competed in the Samarium Group. We stayed sharp by recording our robot completing high-speed shooting and navigation drills, proving that even a global lockdown couldn't keep the Eagles from flying.
ECLIPSE
-
DESTINATION: DEEP SPACE (2019) was a lunar-themed game where two alliances of three robots competed to prepare their Rockets and Cargo Ship for liftoff from Planet Primus. The match began with the Sandstorm, a unique 15-second period where a physical curtain blocked the drivers' view, forcing them to operate via pre-programmed instructions or onboard camera feeds. To score, robots had to first secure plastic Hatch Panels onto the scoring bays to "seal" them, which then allowed them to load orange rubber Cargo balls inside. The game concluded with an intense endgame where robots returned to their HAB Zone to climb a three-tiered platform, with the highest Level 3 climb providing a significant point boost and a crucial Ranking Point for the alliance.
-
During the 2019 DESTINATION: DEEP SPACE season, we took to the field with our robot, Eclipse, and had an incredibly successful run that balanced high-level competition with major team honors. We kicked off the season at the Del Mar Regional, where we not only finished as Finalists on the field but also took home the prestigious Regional Chairman’s Award, the highest honor in FIRST. We continued to show our strength at the Utah Regional and Aerospace Valley Regional, picking up the Entrepreneurship Award at both events for our strong team sustainability. Our Chairman’s win punched our ticket to the FIRST Championship in Houston, where we competed in the Galileo Division and finished with a 4–6–0 record, capstone to a year defined by our technical growth and community leadership.

BANDIT
-
In FIRST® POWER UP℠, the 2018 challenge, two alliances of three teams were "trapped" inside an 8-bit video game where they had to defeat a "boss" by managing game pieces called Power Cubes. Robots scored points by placing these cubes onto large, physical balance scales—the Switch and the Scale—to tip them in their alliance's favor, earning points for every second they maintained ownership of the balanced structures. Beyond physical scoring, alliances could place cubes into an Exchange to earn "Power Ups" like Force, Boost, or Levitate, which provided temporary scoring advantages or guaranteed endgame points. The match concluded with a dramatic finale where robots had to climb the rungs of the central Scale to "face the boss," with the highest-scoring alliance successfully "winning the game" and moving up the tournament rankings.
-
In the 2018 season, Team 399 (Eagle Robotics) demonstrated exceptional engineering and community leadership, solidifying their reputation as a powerhouse in the FIRST® POWER UP℠ challenge. Their season was defined by a massive Regional Win at the Utah Regional and two additional Finalist finishes at the Las Vegas and Aerospace Valley Regionals, proving the high-level consistency of their robot’s cube-handling and climbing capabilities. Beyond their on-field success, the team earned the prestigious Regional Chairman’s Award, recognizing their deep commitment to STEM outreach and the FIRST mission. This balanced achievement of technical excellence and community impact culminated in a strong showing in the Hopper Division at the FIRST Championship in Houston, making 2018 one of the most decorated years in the team's history.

IMPULSE
-
FIRST® STEAMWORKS℠, the 2017 challenge, transported teams into a steampunk-themed environment where two alliances of three robots worked to prepare their "Airships" for a long-distance race. Robots scored points by collecting and delivering yellow plastic Gears to human "Pilots" stationed on the Airship in the center of the field, who then installed them to activate large wooden rotors. Simultaneously, robots could launch neon green Fuel (small plastic balls) into a high or low "Boiler" to build steam pressure, though the scoring math famously prioritized Gear cycles for most teams. The match reached a literal high point during the final 30 seconds when robots had to latch onto ropes and climb several feet into the air to trigger a touchpad on the Airship, signaling they were ready for takeoff.
-
In the 2017 season, Team 399 (Eagle Robotics) fielded a highly competitive robot named Impulse for the FIRST® STEAMWORKS℠ challenge, achieving remarkable consistency across the western United States. At the San Diego Regional, the team secured the prestigious Regional Chairman’s Award and reached the quarter-finals, setting a high standard for both their technical and community impact. They continued this momentum at the Colorado Regional, where they finished as Regional Finalists and earned the Industrial Design Award, before heading to the Idaho Regional to once again claim a Finalist spot and the Entrepreneurship Award. This string of successful performances, characterized by rapid gear delivery and reliable climbing, ultimately qualified them for the FIRST Championship in Houston, where they competed in the Turing Subdivision and finished the official season with a strong 39-23-0 record.

chaMes
-
In FIRST® STRONGHOLD℠, the 2016 challenge, alliances of three robots competed to breach their opponents' "Outer Works" and capture their medieval-themed "Tower." The field was a gauntlet of various modular defenses—including a rock wall, moat, and a moving drawbridge—which robots had to traverse multiple times to "weaken" the defenses for ranking points. To capture the tower, robots launched foam "Boulders" into high and low goals, with the match culminating in a dramatic endgame where robots could surround the tower's base or scale its walls for a 15-point climb bonus.
-
In the 2016 FIRST® STRONGHOLD℠ season, we engineered a robust machine designed to conquer a medieval-themed field, proving its durability by consistently navigating the "Outer Works" obstacles like the Rock Wall and Moat. Our performance across three major regionals was defined by high-intensity play and deep playoff runs, starting with a 12th-place qualification in San Diego where we joined the 7th alliance. We carried that momentum to the Los Angeles Regional, battling our way into the semi-finals as a key member of the 6th alliance, and eventually traveled to the Idaho Regional, where we finished with a 7-5 record and stepped up as Alliance Captain for the 6th alliance. By maintaining a solid presence in the playoff brackets of every event we attended, we solidified our reputation as a versatile and resilient team capable of adapting to the most challenging terrain in FIRST history.

phoenix
-
The RECYCLE RUSH℠ game was a recycling-themed challenge played by two alliances of three teams each on a field divided by a low barrier. Unlike most FIRST games, there was no direct robot-to-robot contact; instead, alliances competed to score points by stacking gray Totes on scoring platforms, topping those stacks with green Recycling Containers, and properly disposing of "litter" (green pool noodles) inside the containers or in a designated landfill zone. High-level play required incredible precision and stability, as a fully capped stack of six totes could earn an alliance 30 points or more, while knocked-over stacks resulted in zero. The match concluded with a cooperative element where both alliances could earn points by adding yellow Coopertition® Totes to a shared central step, encouraging teams to balance their own scoring with the needs of the entire field.
-
In the 2015 FIRST® RECYCLE RUSH℠ season, we faced a unique, non-confrontational challenge where the primary goal was to stack gray totes on scoring platforms and "cap" them with recycling containers for massive point multipliers. Operating on our own side of a divided field, we focused on precision and speed, utilizing our robot's elevator system to build tall stacks and managing "litter" (green pool noodles) to maximize our alliance's efficiency. Our season was highlighted by a spectacular performance at the San Diego Regional, where we not only earned the Creativity Award but also walked away as Regional Winners. We carried this high-scoring momentum through the Inland Empire and Ventura Regionals—winning the Creativity Award at both—and capped off the year with a strong run at the FIRST Championship in St. Louis, competing in the Carson Subdivision.

cortex
-
In AERIAL ASSIST℠, the 2014 challenge, two alliances of three robots competed on a flat field to score large, 2-foot diameter exercise balls into high and low goals. Unlike most FIRST games, the scoring system heavily rewarded cooperation within an alliance; while a single robot could score a ball alone, the point value increased exponentially for every additional teammate that touched the ball before it was scored. This "Assists" mechanic meant that robots often focused on passing the ball over a central truss or across the field to one another to maximize their alliance's "Cycle" points. The match reached its peak in the final seconds as robots attempted to catch balls thrown over the truss or used their mechanisms to block opponent shots, making it one of the most high-speed and collaborative games in FIRST history.
-
In the 2014 AERIAL ASSIST℠ season, we engineered a high-performance machine optimized for the fast-paced passing and catching that defined the year, allowing us to consistently maximize "Assist" points with our alliance partners. This strategic focus on cooperative play turned our season into a masterclass in reliability as we navigated the regional circuit, starting with a 4th-place ranking and a Finalist finish at the Inland Empire Regional, where we also earned the Quality Award. We maintained this elite level of play at the Utah Regional, ranking 5th and again reaching the Finals to secure a silver medal and the Industrial Design Award, before heading to the Las Vegas Regional to rank 3rd and make a deep run into the semi-finals. Our relentless consistency across three states ultimately led us to the FIRST Championship in St. Louis, where we competed in the Curie Subdivision and solidified our reputation as one of the most dependable teams on the field.
Eniac
-
In ULTIMATE ASCENT℠, the 2013 challenge, two alliances of three robots competed to score flying discs (Frisbees) into tiered goals located on their opponent’s side of the field. The match began with a 15-second autonomous period where robots could score pre-loaded discs for higher point values, followed by two minutes of teleoperated control where drivers gathered discs from human player stations or the floor. The game was characterized by high-speed projectiles and strategic defensive play, as alliances could gain bonus points by scoring "colored discs" in their specific goals. The match reached its climax in the final seconds as robots rushed to their alliance's central Pyramid, attempting to climb up its rungs; the higher the robot climbed, the more points it earned, with a Level 3 climb providing a massive 30-point boost to the alliance’s total.
-
In the 2013 ULTIMATE ASCENT℠ season, we engineered our robot, Eniac, to be a powerhouse of both long-range Frisbee accuracy and rapid climbing, prioritizing a high-speed shooter that allowed us to dominate the scoring goals from across the field. Our relentless consistency across a grueling regional schedule led us to rank 4th and reach the Finals at the Inland Empire Regional, where we also earned the Excellence in Engineering Award. We carried that momentum directly into a massive Regional Win at the San Diego Regional as part of the 1st seed alliance, while picking up the Industrial Design Award for our machine's effective and robust construction. We capped off our regional circuit by ranking 4th and reaching the semi-finals at the Las Vegas Regional, where we received the Quality Award before taking our successful streak to the FIRST Championship in St. Louis to compete in the Curie Subdivision.

x1
-
In REBOUND RUMBLE℠, the 2012 challenge, two alliances of three robots competed to score as many basketballs as possible into four hoops located at each end of the field. The hoops were positioned at different heights, with the highest hoop offering the most points, requiring robots to have precise launching mechanisms and adjustable angles. The field was divided by a central "Crest" featuring three tilting bridges. The match reached a tense conclusion in the final 30 seconds as robots attempted to balance themselves on these bridges; an alliance could earn significant bonus points for having one, two, or even three robots balanced simultaneously.
-
In the 2012 REBOUND RUMBLE℠ season, we engineered our robot, X1, to dominate a basketball-themed field, focusing on a high-accuracy shooter and a robust drivetrain that allowed us to target the highest scoring hoops from various positions on the court. Our technical precision and ability to master the high-stakes "Bridge" endgame—where multiple robots had to balance on tilting platforms—turned our season into a historic run of hardware and elite play. We began with a dominant performance at the San Diego Regional, ranking 2nd and emerging as Regional Winners while also taking home the Industrial Design Award. We carried that championship momentum to the Los Angeles Regional, where we reached the Finals and earned the Quality Award, and then traveled to the Utah Regional to secure another Finalist spot and the Excellence in Engineering Award. This streak of three consecutive playoff appearances culminated at the FIRST Championship in St. Louis, where X1 competed in the Curie Subdivision, solidifying 2012 as one of the most decorated and successful years in our team’s history.

JAMES BOT
-
LOGO MOTION™ is played by two competing alliances on a flat 27’ x 54’ foot field. Each alliance consists of three robots. They compete to hang as many inflated plastic shapes (triangles, circles, and squares) on their grids as they can during a 2 minute and 15 second match. The higher the teams hang their game pieces on their scoring grid, the more points their alliance receives. The match begins with one 15-second Autonomous Period in which robots operate independently of driver inputs and must hang Ubertubes to score extra points. For the rest of the match, drivers control robots and try to maximize their alliance score by hanging as many logo pieces as possible. Any logo piece hung on the same peg as an Ubertube receives double points. If teams assemble the logo pieces on their scoring grids to form the FIRST® logo (triangle, circle, square, in a horizontal row in that order), the points for the entire row are doubled. The match ends with robots deploying minibots, small electro-mechanical assemblies that are independent of the host robot, onto vertical poles. The minibots race to the top of the pole to trigger a sensor and earn additional bonus points.
-
In the 2011 LOGO MOTION™ season, we had one of the most successful and decorated runs in our team's history with our robot, James Bot. We proved to be a powerhouse on the West Coast, starting at the San Diego Regional where we ranked 2nd in qualifications and finished as Regional Finalists, while also taking home the Industrial Design Award. We maintained that elite form at the Utah Regional, once again reaching the Finals and earning the Quality Award, followed by a strong semi-finals appearance at the Las Vegas Regional where we were honored with the Excellence in Engineering Award. Our season reached its peak at the FIRST Championship in St. Louis; competing in the Curie Subdivision, we battled our way through the bracket to finish as Division Finalists, solidifying James Bot as a legendary machine in the Eagle Robotics legacy.

THE WIZARD
-
The BREAKAWAY™ game is essentially a high-tech version of soccer played on a 27' x 54' carpeted field divided into three distinct zones by two large, 12-inch high steel "bumps." Two alliances of three robots each compete to score standard size 5 soccer balls into goals located in the corners of the field, with each goal worth 1 point. The match begins with a 15-second Autonomous Period where robots follow pre-programmed instructions to score, followed by two minutes of Teleoperated control where drivers navigate their machines over the bumps or through narrow central tunnels to maneuver the balls.
The game reaches its climax in the final 20 seconds, known as the Finale, where the focus shifts from the soccer balls to the large metallic towers located in the center of the field. Robots earn massive bonus points by "climbing" these towers; a robot is considered Elevated if it is hanging from the tower (worth 2 points), and it is considered Suspended if it is hanging entirely from another robot that is already on the tower (worth 3 points). Because the soccer matches are often low-scoring, a successful double or triple climb in the closing seconds is almost always the deciding factor in a victory.
-
In the 2010 BREAKAWAY™ season, we engineered our robot, The Wizard, to master a high-stakes soccer challenge characterized by 12-inch "bumps" and a low-scoring environment that demanded precision kicking and agile navigation. Our technical performance was highlighted at the Las Vegas Regional, where we reached the semi-finals and were honored with the Industrial Design Award for our robust and effective machine. Beyond the scoreboard, our season was defined by a major victory at the San Diego Regional, where we earned the prestigious Engineering Inspiration Award, an honor that recognizes a team's outstanding success in advancing respect and appreciation for engineering within their community. This achievement secured our spot at the FIRST Championship in Atlanta, where The Wizard competed in the Curie Subdivision, solidifying our reputation as a team that could blend high-level technical performance with a deep commitment to the values of the FIRST community.

TINMAN
-
In the 2009 LUNACY® season, alliances of three robots competed on a unique "Crater" field surfaced with a low-friction material called Regolith, which was designed to simulate the slippery experience of driving on the moon. Each robot pulled a Trailer equipped with a vertical goal, and the primary objective was for robots to launch "Moon Rocks" (pink and blue polymer balls) into the trailers of opposing robots to score 2 points each. The match consisted of a 15-second autonomous period and a two-minute teleoperated period, where strategic maneuvering was nearly impossible due to the slick surface and the use of specialized "Rover Wheels." The game reached its climax in the final 20 seconds as human players attempted to throw high-value Super Cells (worth 15 points) into the trailers, making the endgame a frantic and often decisive scramble for points that could instantly flip the scoreboard.
-
In the 2009 LUNACY® season, we engineered Tinman to navigate the treacherous, low-friction "regolith" surface, focusing on a robust traction system and a precise delivery mechanism to deposit Moon Rocks into opposing trailers. Our technical execution and strategic play were on full display throughout the regional circuit, starting at the San Diego Regional, where we ranked 6th and fought our way to the Finals, finishing as Regional Finalists while also earning the Quality Award. We carried that momentum to the Las Vegas Regional, where we once again reached the Finals and were honored with the Industrial Design Award for Tinman's effective and reliable construction. These back-to-back silver medals earned us a trip to the FIRST Championship in Atlanta, where we competed in the Curie Subdivision, capping off a season defined by our ability to maintain elite performance on a field where most teams struggled just to drive straight.

PHANTUM
-
In FIRST OVERDRIVE™, the 2008 challenge, two alliances of three robots competed in a high-speed "NASCAR-style" race around a central partition called the Overpass. The game was played with giant, 40-inch diameter inflatable balls called Trackballs (red and blue), which robots could manipulate to earn points. During the 15-second Hybrid Period, robots could move autonomously or follow signals from a "Robocoach" to knock Trackballs off the Overpass or cross lines for bonus points. The following two minutes of teleoperated play focused on speed and power, as robots earned 2 points for every counter-clockwise lap they completed and 8 points for every time they successfully "hurdled" a Trackball over the 6' 6" tall Overpass. The match concluded with an exciting finish as robots attempted to place their alliance's Trackballs back onto the Overpass to score a massive 12-point bonus, often leading to dramatic, high-speed collisions in the final seconds.
-
In the 2008 FIRST OVERDRIVE™ season, we engineered our robot, Phantum, to be a high-speed powerhouse designed for rapid laps and powerful "hurdling" of the 40-inch Trackballs. Our season was defined by a remarkable display of speed and technical reliability, which took us all the way to the Finals at the Arizona Regional, where we finished as Regional Finalists and earned the Quality Award. We continued our strong performance at the Las Vegas Regional, where we once again reached the Finals and were honored with the Industrial Design Award for our machine's effective and robust design. These back-to-back silver medals and technical honors secured our place at the FIRST Championship in Atlanta, where Phantum competed in the Curie Subdivision, capping off a year where our speed and consistency made us a constant threat on the track.

BUSTER 399
-
In RACK ‘N ROLL™, the 2007 challenge, two alliances of three robots competed to hang colored inflatable inner tubes on a central, three-tiered circular rack known as the The Rack. The game emphasized strategic placement and "blocking," as alliances earned points by creating rows of consecutive tubes (2, 4, 8, 16, etc., points per row) while simultaneously trying to interrupt their opponents' streaks. The match began with a 15-second autonomous period where robots used infrared sensors to track onto the rack and score for double points, followed by a two-minute teleoperated period of intense maneuvering. The game reached a dramatic conclusion in the final seconds as robots attempted to lift their alliance partners off the ground; scoring was heavily influenced by these "bonus" points, with robots lifted 4 or more inches earning 15 points and those lifted over 12 inches earning a massive 30 points for their alliance.
-
In the 2007 RACK ‘N ROLL™ season, we engineered Buster 399 to be a master of the central rack, focusing on a high-reach arm and a specialized gripper to hang inner tubes with precision. Our technical consistency was on full display at the San Diego Regional, where we ranked 4th in qualifications and battled through the bracket to finish as Regional Finalists, while also taking home the Industrial Design Award. We continued our strong performance at the Las Vegas Regional, where we reached the semi-finals and were honored with the Quality Award for our machine's robust construction. These accolades and high-level playoff appearances secured our spot at the FIRST Championship in Atlanta, where Buster 399 competed in the Curie Subdivision, capping off a season defined by our ability to build a reliable, high-scoring machine that could hold its own against the best teams in the world.

TNT
-
In AIM HIGH™, the 2006 challenge, two alliances of three robots competed to score small, green foam balls into a high circular goal (3 points) or a low corner goal (1 point) on their opponent's side of the field. The game was played on a 27' x 54' carpeted surface and featured a 10-second autonomous period where robots could use a vision-tracking system to find and shoot at the illuminated high goal for double points. During the two-minute teleoperated period, the intensity ramped up as robots navigated around a central "mountain" obstacle and a "ramp" that provided defensive cover. The match concluded with an exciting finish as robots rushed to their alliance's home zone; each robot that successfully climbed onto its alliance's platform by the end of the match earned a 10-point bonus, often providing the narrow margin of victory in high-scoring shootouts.
-
In the 2006 AIM HIGH™ season, we engineered our robot, TNT, to be a high-accuracy marksman, focusing on a rapid-fire turret and a sophisticated vision-tracking system to lock onto the illuminated high goals. Our technical precision was the talk of the regional circuit, starting at the Southern California Regional, where we ranked 3rd in qualifications and fought our way to the Finals, finishing as Regional Finalists while also earning the Quality Award. We maintained that elite level of play at the Las Vegas Regional, where we once again reached the Finals and were honored with the Industrial Design Award for TNT's efficient and robust shooting mechanism. These back-to-back silver medals and technical accolades secured our spot at the FIRST Championship in Atlanta, where TNT competed in the Curie Subdivision, capping off a season where our explosive scoring ability lived up to our robot's name.
MR. CLEAN
-
In TRIPLE PLAY™, the 2005 challenge, two alliances of three robots competed on a 27' x 54' field featuring nine 7.5-foot tall goals arranged in a 3x3 grid, resembling a giant tic-tac-toe board. The primary objective was to place large, PVC-framed Tetrahedrons (tetras) onto these goals, with each tetra scored on a goal earning 3 points, and an additional 10 points awarded to the alliance that had the highest tetra on a goal at the end of the match. Strategy was paramount, as alliances earned a 30-point bonus for "owning" three goals in a row (horizontal, vertical, or diagonal), creating a high-stakes battle for field position. The match concluded with a frantic endgame where robots could earn 10 points each by returning to their alliance's starting platform, making it a game where a single well-placed tetra or a last-second climb could completely shift the final score.
-
In the 2005 TRIPLE PLAY™ season, we engineered Mr. Clean to be a master of the "tic-tac-toe" field, focusing on a robust lifting mechanism to stack large PVC tetrahedrons with clinical precision. Our strategic play was on full display at the Arizona Regional, where we ranked 4th in qualifications and battled through the bracket to finish as Regional Finalists, while also taking home the Industrial Design Award. We continued our strong performance at the Las Vegas Regional, where we once again reached the Finals and were honored with the Quality Award for our machine's reliable and effective construction. These back-to-back silver medals and technical accolades secured our spot at the FIRST Championship in Atlanta, where Mr. Clean competed in the Curie Subdivision, capping off a season where our ability to "clean up" the field and secure goal rows made us one of the top threats in the competition.

gobbstopper
-
In FIRST FRENZY: Raising the Bar™, the 2004 challenge, two alliances of three robots competed to score small, yellow 7-inch "Small Balls" into high-reaching stationary goals (5 points) or low mobile goals (1 point). Each alliance also had a "Multiplier Ball" (a 13-inch purple ball) that, if placed in a goal, would double the points for all Small Balls in that specific goal. The game featured a 15-second autonomous period and a two-minute teleoperated period, but it is most remembered for its high-flying Endgame. In the final 20 seconds, robots scrambled to reach a 10-foot tall Bar located in the center of the field; any robot successfully hanging from the bar at the end of the match earned a massive 25-point bonus, often leading to dramatic, last-second aerial feats that could completely swing the final score.
-
In the 2004 FIRST FRENZY: Raising the Bar™ season, we engineered Gobbstopper to be a versatile scoring machine, focusing on a robust ball-handling system and a high-reach mechanism to tackle the 10-foot tall center bar. Our technical execution was on full display at the Southern California Regional, where we ranked 5th in qualifications and fought our way through the bracket to finish as Regional Finalists, while also taking home the Industrial Design Award.
We maintained that elite level of play at the Arizona Regional, where we once again reached the Finals and were honored with the Quality Award for Gobbstopper's reliable and effective construction. These back-to-back silver medals and technical accolades secured our spot at the FIRST Championship in Houston, where we competed in the Curie Subdivision, capping off a season where our ability to "raise the bar" and secure hanging bonus points made us a constant threat on the field.
oompa loompa II
-
In STACK ATTACK™, the 2003 challenge, two alliances of two robots each competed on a 24' x 48' carpeted field dominated by a large central Ramp and 29 plastic storage containers. The primary objective was to collect and stack these containers into the highest possible piles within their respective scoring zones, with each container in a stack earning 1 point if it was within the zone and an additional 1 point for every container it supported. The match featured a 15-second autonomous period where robots used infrared sensors to navigate toward the containers, followed by two minutes of intense teleoperated play where robots fought for "King of the Hill" status on the central ramp. At the end of the match, any robot remaining on the top platform of the ramp earned a massive 25-point bonus, often making the final seconds a literal uphill battle to secure the win.
-
In the 2003 STACK ATTACK™ season, we engineered Oompa Loompa II to be a master of the central ramp, focusing on a robust drivetrain and a specialized gripper to collect and stack large storage containers with clinical precision. Our technical execution and strategic play were on full display throughout the regional circuit, starting at the Southern California Regional, where we ranked 2nd in qualifications and fought our way to the Finals, finishing as Regional Finalists while also earning the Quality Award. We carried that momentum to the Arizona Regional, where we once again reached the Finals and were honored with the Industrial Design Award for Oompa Loompa II's effective and reliable construction. These back-to-back silver medals and technical accolades secured our spot at the FIRST Championship in Houston, where we competed in the Curie Subdivision, capping off a season where our ability to "stack up" against the best teams in the world made us a constant threat on the field.

oompa loompa
-
In ZONE ZEAL™, the 2002 challenge, two alliances of two robots each competed on a field divided into four distinct zones to manipulate 20 small balls and three large mobile goals. The primary objective was to move these goals—which weighed up to 180 lbs when filled with balls—into the alliance's scoring zones, with each goal in a home zone earning 10 points and each ball inside a goal adding another 1 point. The match featured a 20-second autonomous period where robots could use light sensors to locate the goals, followed by two minutes of intense teleoperated play characterized by "tug-of-war" style battles over the mobile goals. The game reached its climax in the final seconds as robots raced to their alliance's End Zone; any robot positioned in the end zone at the conclusion of the match earned an additional 10 points, often serving as the tiebreaker in high-intensity matches where goal positioning was neck-and-neck.
-
In the 2002 ZONE ZEAL™ season, our original Oompa Loompa robot was a powerhouse designed for the heavy lifting required to move the 180 lb mobile goals. Our strategy centered on high-torque drivetrains and robust "hook" mechanisms that allowed us to latch onto goals during the autonomous period and maintain control through intense tug-of-war battles in the teleoperated phase. This technical reliability led us to the Finals at the Southern California Regional, where we finished as Regional Finalists and earned the Quality Award. We continued this momentum at the Arizona Regional, reaching the semi-finals and taking home the Industrial Design Award. These honors secured our place at the FIRST Championship in Orlando, where Oompa Loompa competed in the Curie Subdivision, marking a pivotal year in our team's history as we proved we could hold our own in high-stakes, goal-oriented gameplay.

cledus
-
In DIABOLICAL DYNAMICS™, the 2001 challenge, the traditional head-to-head format was replaced by a cooperative mission where a single alliance of four robots worked together against the clock to achieve the highest possible score. The field featured two large Mobile Goals and a massive, teeter-totter like Balancing Bridge in the center. Robots earned points by placing small balls (1 point) and large balls (10 points) into the goals, but the real complexity came from the multipliers: the total score was multiplied by 2 if the goals were on the bridge, by 3 if a robot was also on the bridge, and by 4 if the bridge was successfully balanced. This unique "all-in-the-same-boat" dynamic forced teams to coordinate their autonomous and teleoperated movements perfectly to ensure the bridge remained level, as a single robot's mistake could wipe out the entire alliance's multiplier in the final seconds of the match.
-
In the 2001 DIABOLICAL DYNAMICS™ season, we engineered Cledus to be a master of the central Balancing Bridge, focusing on a robust drivetrain and a specialized "hook" system to securely position itself and our alliance's mobile goals. Our technical precision was on full display at the Southern California Regional, where we worked seamlessly with our alliance partners to achieve some of the highest multipliers of the weekend, earning us the Quality Award. We continued this cooperative success at the Las Vegas Regional, where we were honored with the Industrial Design Award for Cledus's effective and reliable construction. These accolades and high-scoring performances secured our spot at the FIRST Championship in Orlando, where we competed in the Curie Subdivision, capping off a season where our ability to "stay balanced" under pressure made us one of the top teams in the world.

pacbot
-
In CO-OPERTITION FIRST™, the 2000 challenge, two alliances of two robots each competed on a carpeted field to score points by placing 13-inch balls into trough-style goals. Yellow balls were worth 1 point each, while the rare black balls were worth 5 points. The field featured a central 8-foot wide Ramp with a 5-foot high horizontal bar connecting the two goals. At the end of the two-minute match, robots earned 5 points for being fully on the ramp or a significant 10 points for hanging from the bar. The game's name highlighted a unique scoring system for qualification matches: the winning alliance received triple the losing alliance's score in points, incentivizing teams to help their opponents score rather than shutting them out, as a close 10-9 win was far more valuable than a 20-0 blowout.
-
In the 2000 CO-OPERTITION FIRST™ season, we took Pacbot to the NASA Ames Regional in San Jose. It was a wild year for us because of the "Co-Opertition" scoring—we actually had to make sure our opponents scored points just to boost our own ranking, which felt totally counterintuitive at first!
After the regional, we headed out to the National Championship at Epcot Center in Orlando. While we didn't bring home any trophies that specific year, the lessons we learned wrestling Pacbot onto that 5-foot hanging bar and fighting for position on the 8-foot ramp really set the stage for our "silver medal" era. It was the technical foundation that eventually led to our back-to-back Finals appearances in the seasons that followed.